0755 8655 3831
0755 8655 3831 sales@foreachtek.com
sales@foreachtek.com- 首页
-
产品中心
- 泵系列
- 柱塞泵系列TM-柱塞泵SM-柱塞泵EA-柱塞泵ALS-零背隙柱塞泵
- 无阀泵系列
双头无阀泵单头无阀泵- 高压泵系列
- 移液泵
SMTP0SMTP2SMTP4SSTP1SSTP2- 注射泵系列
旋转阀注射泵电磁阀注射泵立式注射泵- 阀系列
- 夹管阀PV90PV91
- 电磁阀
6010-电磁阀6VMK-电磁阀- 旋转阀
- 高压阀
- 热控系列
- 智控系列
- 针系列
- 管路及连接件
- 硬管接头标滚螺纹堵头紧凑螺纹堵头标滚平底接头经典 标滚平底接头紧凑平底接头经典 紧凑平底接头标滚卡箍接头经典 标滚卡箍接头紧凑卡箍接头经典 紧凑卡箍接头
- 快插接头
Q20Q40Q60- 倒刺接头
直通接头L型接头T型接头Y型接头倒刺堵头- 螺纹转倒刺接头
螺纹密封底面密封 直通底面密封内螺纹转倒刺- 鲁尔接头
公鲁尔锁圈公鲁尔堵头母鲁尔穿板母鲁尔滚花螺母色环- 螺纹互转接头
二通内螺纹穿板二通内螺纹23十二月精密柱塞泵应用指南-间隙补偿来源:深圳恒永达反向间隙
未使用特殊消隙螺母来制作的柱塞泵都存在一定程度的反向间隙。这种间隙主要是由导杆与螺母之间的机械公差造成的,这种无法消除的机械公差使得衔接的导杆与螺母之间留有间隙。在导杆反向转动时,这些间隙会导致螺母有一段空行程。而且不同的柱塞泵之间,这种间隙的幅度一定不是完全一致的,为了实现柱塞泵性能的最优化,必须对泵的反向间隙进行测定,并在操作使用过程中对反向间隙进行补偿。
反向间隙的测定
反向间隙的测定有多种方式,可使用比重测定,吸收率测定或者高度测定。比重测定和吸收率测定的方式较接近实际应用场景,但是影响因素较多,如液路可靠性,天平稳定性, 光学系统的准确性等,无法完全真实的反应柱塞泵的实际间隙值。高度测定法通过精确测量柱塞的运行行程,能够更为准确的测量出实际的反向间隙值。Foreach使用高度法对HaloFlx系列柱塞泵进行反向间隙测定。
测定步骤(高度法)
1. 重复以下步骤20次, 并且记录每次测试的结果
l 泵复位
l 吸入80%行程
l 排出100整步以确保消除未知的反向间隙
l 记录此时的值为原点值(Vs)
l 排出50%行程
l 吸入50%行程
l 记录此时的值为终点值(VD)
l 本次测最的方向间隙结果为Vs—V。
2. 计算20次结果的平均值, 得出平均反向间隙值
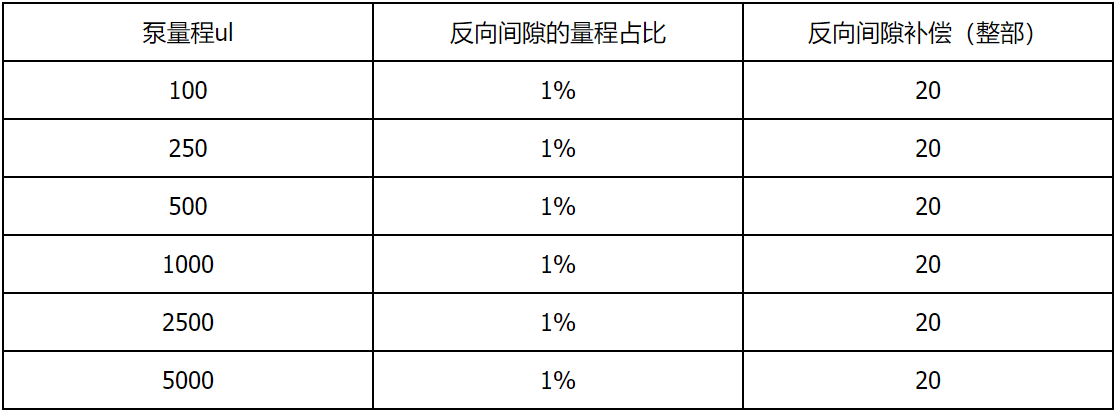
反向间隙补偿表
泵量程ul
反向间隙的量程占比
反向间隙补偿(整步)
100
1%
20
250
1%
20
500
1%
20
1000
1%
20
2500
1%
20
5000
1%
20
如何进行反向间隙补偿
消除反向间隙的方式有很多种, 我们的目的就是要在时序的反向操作前添加隙补偿时序。
方式一:吸入X, 排出X
1. 柱塞泵复位
2. 吸入背隙补偿上限步数(20步)
3. 操作自动化机械臂将采样针针尖浸入试剂杯,吸入设定的吸液量X
4. 操作机械臂将针抬起,移至反应杯,
5. 排出设定的吸液量(X) +背隙补偿上限步数(20步)。
这种方式仅仅在复位之后添加了一个吸入背隙补偿的时序,操作简单,操作后无液体残留, 减少试剂浪费。 适用于单次吸入单次排出,吸入值与排出值相同的场合,
方式二:吸入X,排出Y,再排出Z(X=Y+Z)
1. 柱塞泵复位
2. 吸入背隙补偿上限步数(20步)
3. 操作自动化机械臂将采样针针尖浸入试剂杯, 吸入设定的吸液量X
4. 吸入背隙补偿上限步数(20步)
5. 排出背隙补偿上限步数(20步)
6. 操作机械臂将针抬起, 移至反应杯1, 排出设定的吸液量Y
7. 操作机械臂将针抬起, 移至反应杯2, 排出设定的吸液量Z
这种方式较为复杂,设定的原理是在吸入液体之前先进行间隙补偿,然后吸入指定的吸液量,在排出之前先做了一个吸入间隙补偿,因为已经做过了吸入间隙补偿,所以这里其实是完全吸入补偿量,然后做一个排出间隙补偿,这样柱塞泵内剩余的液体量
X'= X+(1%—反向间隙值),x总量程,因为反向间隙值是<1%的,所以剩余的液体量X'>排出值(Y+Z)。
相关文章:相关产品: - 快插接头
- 电磁阀
- 无阀泵系列
- 柱塞泵系列
- 泵系列